
Na první pohled to je drahá hračka pro rodinné párty, ale nenechme se zmást komercializací toho produktu. Nikdo ze současných hráčů nedotáhl projekt EAA (Electronically Assisted Astronomy) takto daleko. Dalekohled má naprosto jednoduché ovládání, které se snaží o co nejmenší nutné zásahy pozorovatele a co největší autonomnost zařízení. Dalekohled obsahuje jako řídící počítač univerzální platformu Raspberry PI 3 A+ a nadstavbu (Unishield od Unistellar).
Technický rozbor přístroje:
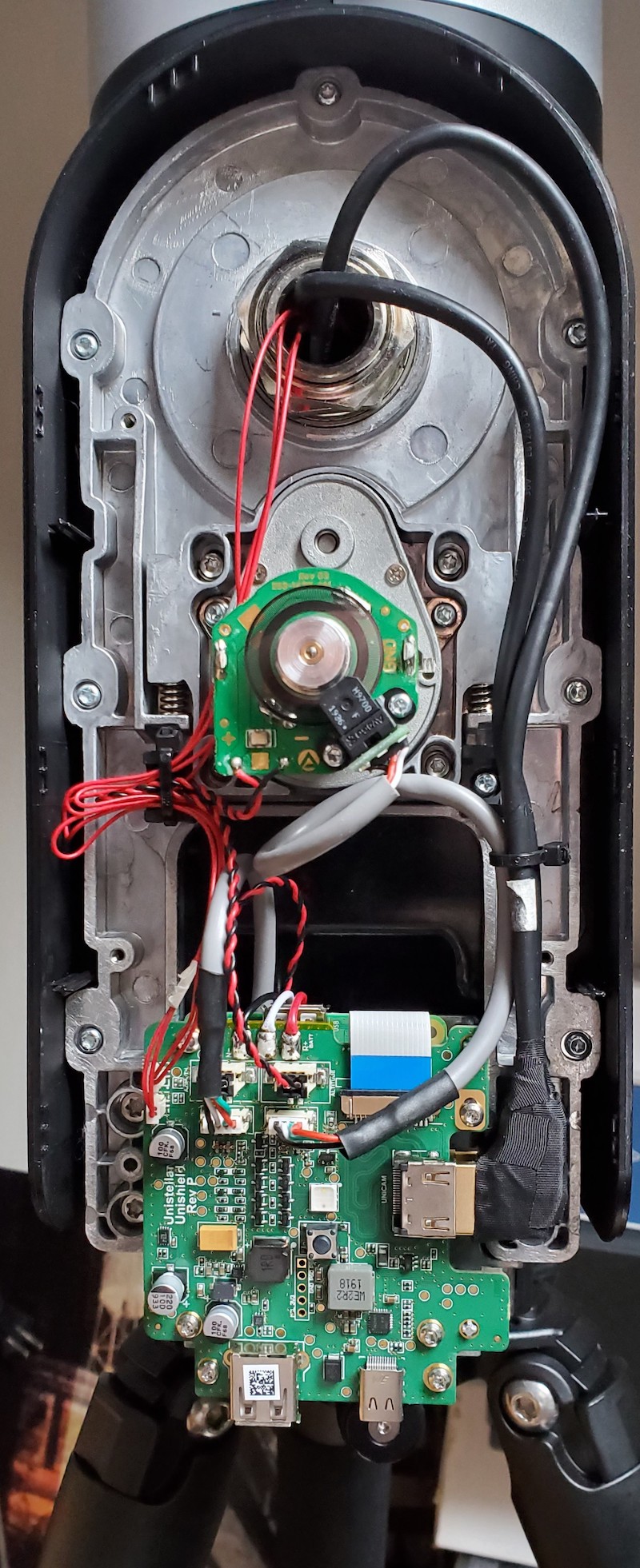
Podívejme se blíže na hradware celého dalekohledu o kterém se nikde nedočtete. Jak jsme si řekli, hlavním srdcem eVscope Raspberry PI 3 A+, které pomoci nadstavby řídí celý jak proces ustavení a vyhledání objektu tak pomocí nadstavby řídí motory AZ montáže. Na desce je rovněž umístěn čip dsPIC33E, který je odpovědný za řízení gyroskopu a akcelerometru. Dalekohled je zcela autonomní, tedy obsahuje i baterii pro provoz zhruba na 9-10 hodin.
Software, který je v dalekohledu je opravdu propracovaný a podle jeho obsahu je za ním desetitisíce hodin práce. SD karta obsahuje 4 oddíly (partition 1-4) ve kterých je umístěn dvakrát OS (1 a 2), pro případ kdy OS zkolabuje, nebo dojde k poruše OS při updatu FW - už zde vidíte na co vše autoři mysleli. Oddíl 3 obsahuje velou databázi hvězd (3,4 GB) pro ustavení, oddíl 4 (11 GB) je největší a obsahuje uživatelská data.
Přístup do dalekohledu je možný přes SSH, bohužel autoři jej jistí klíčem s 4096 RSA bitovou šifrou, nicméně se mi podařilo toto zabezpečení prolomit a tak je možné nahlédnou pod pokličku OS. Autoři samozřejmě mysleli na všechno, tedy nepoužívají klasický souborový systém, která by šel kopírovat, ale vymysleli řešení, kdy spouští FW do paměti, které nelze jednoduše hacknout a sledovat jak to celé funguje. Tedy nelze stahovat hotové obrázky apod., což je škoda. Dalekohled vykonává obrovské množství funkcí, jen pro zpracování obrazu použíje desítky procesů. Při základním zpracování pracuje s fomáty RGB a YUV. V adresářích lze najít pouze soubory .fbo, které dalekohled používá jako náhledy při ustavování dalekohledu (plate solving), nebo do nich ukládá průběžné snímání obrázků ve odborných programech výzkumu, které jsou prakticky jinak nepoužitelné. Formát FBO je navíc s většinou software nekompatibilní a pro jeho dekodování jsem použil SW bayer2rgb. V adresáři jsou dvě velikosti souborů 1.9 a 2.5 MB (pro okulár a displej telefonu). Takto vypadá stažený a dekodovaný soubor fbo z dalekohledu. Skládání a alignment obrázků probíhá zřejmě pouze v paměti Raspberry a po vypnutí dalekohledu jsou navždy ztraceny.

Dalekohled má jednu malou nectnost. Ty soubory FBO ukládá SW pro další výzkum výrobce a po pár dnech pozorování zaplní vyhrazený prostor, pokud chcete tyto soubory odstranit (např. před odesláním nafocené sekvence do Unistellar) a musí se odeslat výrobci přes WiFi. I v zaplněném prostoru na 100% určeném pro FBO souboru lze dál bez problému dělat pozorování. V mém případě lze pomocí ssh jednoduše soubory vymazat a pokračovat dál bez problému i když se odesílání nebráním. Druhá výhoda je, že pokud pořídím snímky zákrytu nebo jakýkoli děj, nahrává se právě do těchto fbo souborů a lze jej následně vyvolat a zjistit přesný čas zákrytu, protože každý soubor má v názvu Unixový čas s přesností na tisíciny sekundy, tedy např. soubor označený 1604336681228.fbo byl pořízený přesně 2.11.2020 v 18:04:41.228 hod.
Doporučuji si udělat zálohu celého disku vytvořením klonu SD karty (SanDisk Ultra 16 GB A1, tedy minimálně 10 Mb/s zápis, jinak to zlobí), nejen pro případné pokusy, ale stalo se některým uživatelům, že se karta poškodila a pak jsou odkázáni na dodání nové karty od výrobce. Já jsem zvolil kartu 32 GB A1 se zápisem až 90 Mb/s pro bezproblémový chod a rychlé ukládání dat.
Servis dalekohledu je typicky francouzský, tedy pokud se na dalekohledu něco rozbije, počítejte klidně s 2 měsícema v opravě, ještě že je v rámci EU.
Schema zařízení je následující:
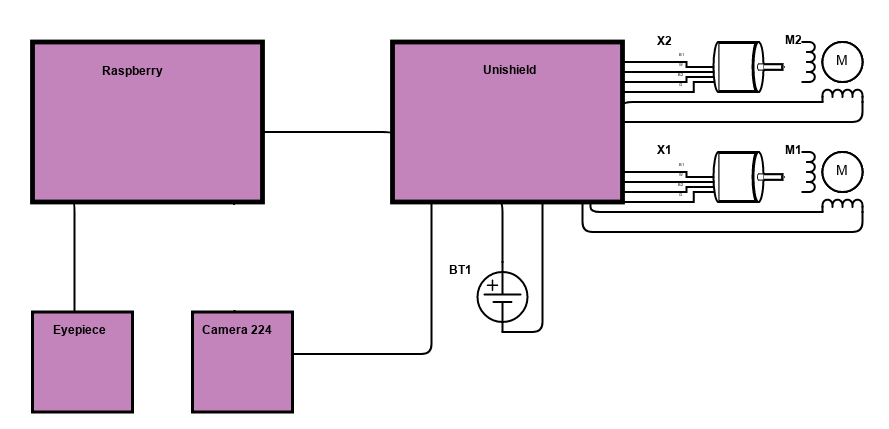
Raspberry PI 3 A+ zvolili autoři v době, kdy vyvíjeli aplikace, protože má celkem malý příkon v idle režimu a i v pracovním režimu je ještě celkem úsporný a PI 4 je v tomto ohledu na tom podstatně hůře. Výrazně výkonnější je pro zpracování obrazu PI 3 B+ ovšem není tak kompaktní jako PI 3 A+.
Motory M1 a M2 jsou DC 12V s převodovkou nízkootáčkové (16 rpm) s odběrem 95 mA v klidu a 350 mA v běhu.
Jako enkodéry X1 a X2 byly použity senzory HEDS-9700 F50, které mají 256 impulsů na otáčku motoru (jsou na ose motoru), což dává naprosto dostatečné rozlišení i při desíti otáčkách motoru na stupeň (1,5”).
Kamera má barevný čip IMX224 s integrovanou funkcí WDR (Wide Dynamic Range) s rozlišením 1304x976 pix a dává s dalekohledem 0,47° zorné pole a má velmi slušnou QE 75-80% v oblasti Halfa. Navíc má kamera při Gain 60 velmi malý šum a velký DR (12.8 stop). Já bych volil čip IMX385, který by má stejné parametry, ale je větší, tedy větší zorné pole, nicméně zpracování obrazu by již bylo o dost náročnější a hlavně by se musel použít už korektor pole, protože Newton F4 má už od 4 mm od osy velmi znatelnou komu, tedy čip s úhlopříčkou 6 mm je použitelné maximum, navíc je výsledný obrázek zbaven nejhorších rohů fotografie ořezem.
S Raspberry komunikuje kamera přes HDMI (TDMS Ch1 a 2) rozhraní (kabel vede do Unishield a následně přes plochý kabel do Raspberry konektoru Camera), nepoužívá však standardní knihovnu libcam pro zpracování obrazu, ale knihovnu OpenCV a ZeroMQ, pro širší možnosti uplatnění v přenosu signálu přes nproc, IPC, TCP, UDP apod., se zabezpečeným přenosem dat, autentizací atd. Při zpracování videa používají Broadcom BM2835 V4L2 driver a získávají informace o GPU Raspberry pomocí příkazů vcgencmd. Dalekohled totiž zaznamenává i video pro sledovací programy (bude uvedeno dále). Autoři při návrhu kamery museli počítat jak s velikostí zpracovávaných dat, tak s vhodným zorným polem pro DSO, protože při větších čipech by byl problém v reálném čase zpracovat takové množství dat s Raspberry a při malém zorném poli zobrazit větší DSO.
Okulár je malý OLED displej s optikou +/- 3 diopt. S obřím kontrastem 10000:1 (černá je opravdu nesvítivá černá) a rozlišení 992x976 pix s kruhovou maskou, tedy v noci neoslňuje. Stačí si udělat jednoduchý test, dát na dalekohled kryt a na displeji v úplné tmě vidíme pouze hotpixely na velmi tmavém pozadí. Připojený je do HDMI na Raspberry.
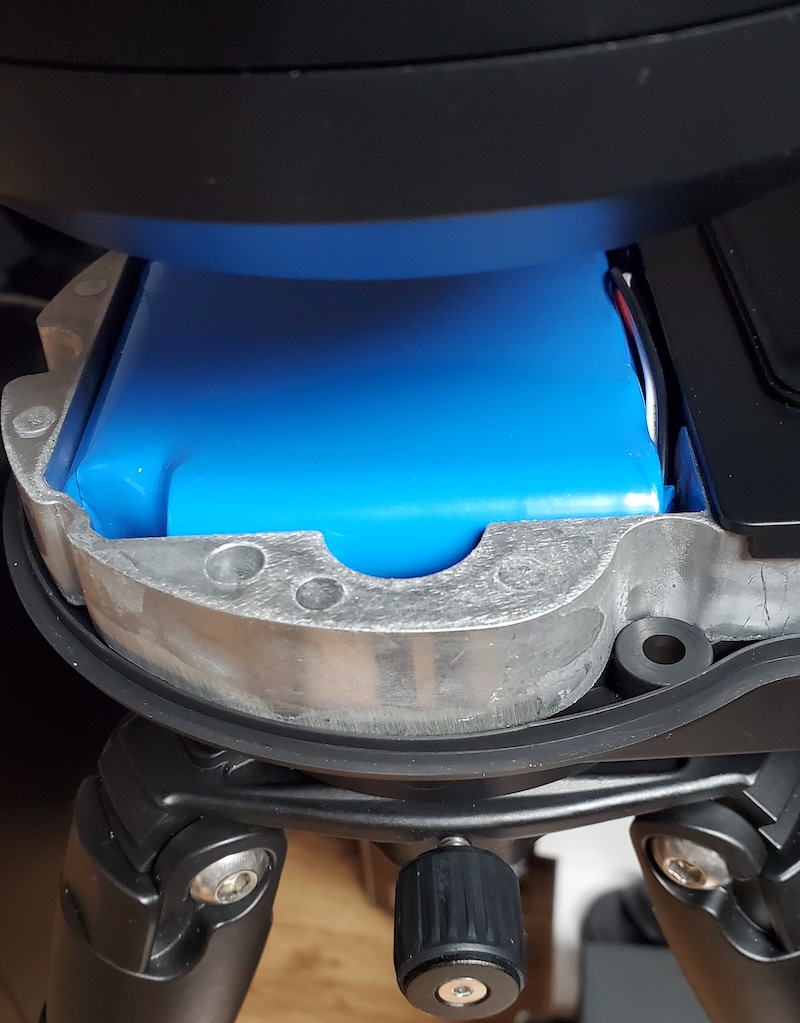
Baterie BT1 3,7/15 Ah (55.5 Wh) Li-Ion, klasické články 18650 dávají dostatečnou kapacitu, jen je potřeba nabíjet s předstihem, protože se nabíjí 8-9 hodin z 0% na 100% kapacity. Nabíjet lze nabíjet i během pozorování, nicméně nelze baterii nabíjet pokud má méně než cca 10°C (brání tomu nabíjecí obvod BQ25895) a aby k tomu nedošlo, je potřeba ji začít nabíjet ihned po vynesení ven, tím se neochladí. K baterii se lze poměrně snadno dostat a autoři počítali i s její výměnou, tedy je lehce vyjmutelná, připájená je přímo na desku Unishield (lepší než konektory, které časem zlobí) a možnost výměny baterie je jednoznačné plus. Doporučuji nabíjet baterii na 100% pouze pokud budeme pozorovat, jinak skladovací kapacit je nejlépe mezi 30-70%.
Na spodní části montáže dalekohledu jsou dva konektory USB a USB-C. První slouží k nabíjení mobilního zařízení v případě nutnosti, druhý slouží k samotnému nabíjení baterie 15 Ah nabíječkou +5V/2.4A.
Testoval jsem i zatížení jader CPU a využití paměti při focení, je vidět, že Raspberry ty procesy celkem zvládá, větší rozlišení čipu by bylo problematičtější, na druhou stranu by šlo použít výkonnější PI 4. Umím si to představit u další verze dalekohledu s větším průměrem a větším čipem kamery. Dokážu si i představit, že výrobce dá na trh zařízení s kamerou, které se připojí k libovolnému dalekohledu a montáži a přes WiFi či LAN kabel bude fungovat jako samostatná jednotka řízení celého procesu EAA. Toto je maximální vytížení při skládání, které trvá cca 2 sekundy, pak se CPU vráti prakticky do klidu a čeká na vyčtení dalšího snímku a skládání. RAM rovněž není plně využita.

Mechanické provedení:
Kryty dalekohledu a montáže jsou vyrobeny z umělé hmoty, tubus je hliníkový s vnitřím eloxem, který není zrovna ideálním povrchem, neboť se poměrně dost leskne. Vzhledem k tomu, že je dakeohled určen pro pozorování DSO a kamera je přímo v ohnisku umístěná v 5 cm dlouhém tubusu, tak se konstrast zhoršovat nebude, při větším parazitním světle bych doporučil rosnici. Čryř-ramenný držák kamery je rovněž umělohmotný, což je škoda, kovový by umožnoval lepší odvod tepla. Kostra montáže je jednolitý duralový výlisek, který zajištuje pevnost a tuhost celé montáže.
Duralová trojnožka k dalekohledu vykazuje velmi slušnou tuhost (obával jsem se před nákupem opaku) a není možné použít jinou z důvodu jiného uchycení dalekohledu. Možná by dal někdo přednost univerzálnějšímu řešení, ale autoři zvolili systém tubusu o průměru 7 cm s hlubokou rybinou a po povolení jednoho ze dvou šroubů lze celou montáží s dalekohledem pohodlně otáčet kolem osy, aniž by měl možnost spadnout. Pokud se vysunou dva segmenty ze tří, umožňuje pohodlné pozorování ze židle.
Celkový pocit z mechaniky dalekohledu mám dobrý (až na zmiňované věci) a je vidět, že u toho autoři hodně přemýšleli, ke všem elektronickým komponentům je velmi snadný přístup.
Takto vypadá Dark Frame při pokojové teplotě stažený z dalekohledu (zesvětleno), který se používá při processingu skládání fotografií a lze jej pořídit těsně před samotným focením. Zvláštností eVscope je, že nelze pořídit DF při nižší teplotě než 10°C (nelze ani nabíjet baterii, což je uvedeno v návodu). Důvod toho mi není jasný, u baterie bych to ještě jakž takž pochopil, ale u DF to vůbec nedává smysl, zvláště když výrobce doporučuje pozorovací podmínky od -10°C do +40°C. Po dotazu na výrobce nebyl schopen odpovědět na dotaz, proč to tak je. Pokud jsem neměl dobitou baterii a přesto bylo např. 5°C, dal jsem dalekohled ven chladit (ideálně 30 minut a více), ale připojil nabíječku. Na horní kryt baterie jsem dal kolečko z izolační alu folie, baterie se méně ochlazuje v zimě a vydrží delší provoz.

Spuštění a ovládání dalekohledu:
Dalekohled komunikuje s uživatelem pouze přes telefon/tablet iOS nebo Android, rovněž lze použít na počítači emulaci těchto systémů, já jsem vyzkoušel emulátor Android na Mac OSX. Po zapnutí dalekohledu který je v poloze směrem zenit. Skloníme joystickem dalekohled mimo zenit a namíříme přibližně do směru (povolíme šroub v rybině stativu a otočíme dalekohledem), ve kterém chceme pozorovat. Proběhne první základní ustavení pomocí plate solving (trvá pouze 15-20 sekund). Jak jsem již zmínil, dalekohled má GPS, má gyroskop a akcelerometr, zná zorné pole kamery, tím pádem má úlohu díky tomu usnadněnou. Po ustavení lze zadání název objektu (nebo souřadnice EQ či AZ) v aplikaci najede na příslušné místo na obloze, udělá plate solving, srovná znovu polohu a znovu plate solving pro dokonalé vystředění objektu.
Aplikace provádí 4 sekundové expozice (nutné z důvodu AZ montáže a rotace pole) s tím, že uživatel nezadává expozice a pouze sleduje skládání jednotlivých snímků, kdykoliv může tento proces zastavit a snímek stáhnout do zařízení (i bez zastavení načítání), případně někam odeslat či sdílet. U snímků odečítá zároveň dark frame, který může uživatel pořídit před pozorováním. Rovněž v procesu pracuje s udečtem gradientů a jakýmsi HDR processingem. Celý tento proces může sledovat více lidí nezávisle na operátorovi a jeho zařízení, protože je zde možnost připojení až 10 zařízení současně (1 operátor a ostatní pozorující). Snímky formátu png 8 bit se ukládají v následujícím “kulatém” tvaru nebo neoříznutém (volba v nastavení). Focený objekt lze na displeji zoomovat až 7x. V budoucnu se předpokládá možnost formátu tiff 16 bit, se kterými SW beztak pracuje.
Je jasné, že se autoři se potýkali s neskutečným množstvím problémů, jak při skládání snímků tak při různých gradientech oblohy, vyvážení barev, zvláště při focení z města, navíc v různých podmínkách pracovat s dynamikou snímku a toto celé zautomatizovat není vůbec žádná sranda. Na druhou stranu tím je ovládání naprosto jednoduché stačí zmáčknout tlačítko počkat pár vteřin zvolit objekt a už se jenom dívat. Není potřeba řešit kabely, baterii, připojení kamery, pointaci, ustavování na Polárku, na kterou někdy ani nevidíme a podobné věci. Výhodou tohoto řešení je, že přenesete během pozorování dalekohled např. kvůli výhledu o několik metrů dál a nic se neděje, dalekohled pokračuje ve vyhledávání objektů bez problému dál bez ustavování. Navíc výrobce k dalekohledu prodává speciální batoh (výborně zpracovaný), kam vše uživatel uloží včetně stativu a může s dalekohledem pohodlně cestovat.
Příslušenství
K dalekohledu se standardně dodává pouze kvalitní stativ, který je opravdu bytelný a moje obavy se nenaplnily. Je možné rovněž dodat velmi pěkný batoh (doporučuji koupit), který je skvěle navržený pro převážení dalekohledu i v náročnější podmínkách skladování (vystélky jsou opravdu mohutné).



Focení nebo koukání?
Kvalita snímků je samozřejmě omezená automatickým zpracováním, připomíná nám to snímky před 12 lety kamerami Meade DSI 3 nebo Canon 300D newtony 150 mm. Tento dalekohled si tedy nehraje na astrograf, ale na jednoduché a rychlé zobrazení objektů, které nejsou v malých dalekohled ani vidět a ve velkých jako nejasné flíčky na obloze. Rovněž ideální na pozorování malých těles sluneční soustavy, které dalekohled najde, díky rychlému plate solving, rychle a bez větší námahy. Síla v tomto přístroji je v jednoduchosti, přesnosti a rychlosti. Jaký dalekohled s kamerou sestavíte a ustavíte bez Polárky za 2 minuty a vidíte první objekt? Okulár je spíše zajímavost, protože snímky si většinou uživatel prohlédne na displeji tabletu, nicméně ten pocit koukání do dalekohledu okulárem je zajímavý, okulár oko neruší a dává to pocit “dívání do dalekohledu”.
Je jasné, že EAA barevnou kamerou je pro řadu lidí hezčí, nicméně kamera je méně citlivá a použití DSO nebo úzkopásmových filtrů nebo je problematické. Navíc pevně umístěná kamera má nevýhodu, že si nemůžeme pootočením kamery nastavit kompozici.
Na druhou stranu autoři nechtěli udělat přístroj pro jen bezduché sledování obrázků, proto připravili i sledovací programy pro amatéry, tedy zákryty hvězd planetkami, bude následovat sledování exoplanet, kometárních úkazů, nebo náhlých vesmírných událostí. Celý ukaz se jednoduše zaznamená a odešle stisknutím tlačítka v aplikaci do centra ke zpracování. Tento způsob ale přináší pozorovateli dost zásadní problém, nedostane se k takto pořízeným datům. Jediná možnost je tedy hacknout dalekohled a pak je možnost si přes SSH stáhnout pořízené obrázky do počítače. Jejich zpracování ale není úplně jednoduché, protože formát FBO je naprosto nestandardní formát.
Pozorování:
Doporučuji nechat dalekohled teplotně aklimatizovat (temperace) minimálně 20-40 minut před pozorováním (záleží na teplotním rozdílu), následně zaostřit případně zkolimovat dle návodu výrobce. Ostření velkým plochým kolem v zadní části dalekohledu s průměrem 8 cm, umožňuje dostatečnou přesnost. Kolimace 2 imbus šrouby je rovněž bezproblémová. Veškeré potřebné nářadí je přiloženo k dalekohledu v pěkném látkovém balení. Výrobce myslel i na čištění zrcadla, proto je celá zadní část pomocí 4 šroubů odnímatelná, dokonce pokud by někdo chtěl lepší optiku, lze si objednat zrcadlo lambda/10 u jiného výrobce např. Antares. Díval jsem se na zrcadlo přes Ronchi a přijde mi přesnost na tento typ pozorování naprosto dostatečná v úrovni lambda/6. Nikde jsem neobjevil žádné zonální vady apod.
Denní pozorování připomíná pohled do běžného okuláru pouze je obraz výrazně tmavší, to je kvůli minimalizaci oslnění oka. Kamera je v režimu expozice kolem 1-2 ms (dle nastavení Gain), naprosto dostačující pro plynulé zobrazení objektů v reálném čase. Co trochu chybí je hledáček na dalekohledu, ale není problém tam přidělat např. red-dot (nalepit na tubus úchyt Baader se sinusoidní plochou). Obrázek 160 m vzdálené paraboly (upraveno WB).
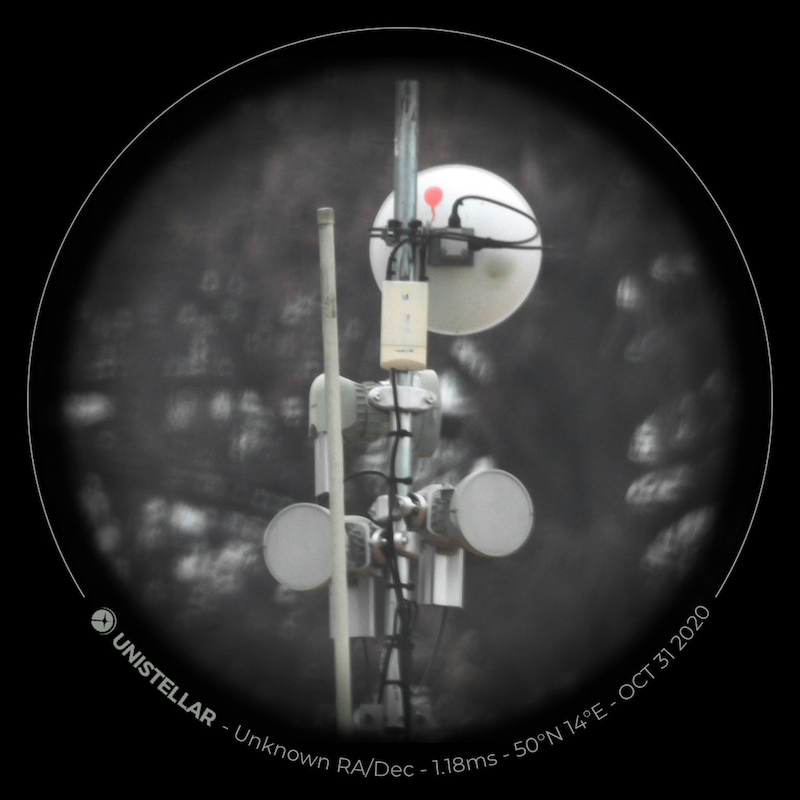
Pro denní pozorování se dalekohled moc nehodí i když použít se dá, WB nepracuje moc dobře v denním světle díky IR filtru, který je až do 700 nm a je určen pro astro.. Dalekohled se ovládá pomocí virtuálního joysticku na displeji telefonu, tabletu).
Vyzkoušel jsem vyfotit v lehkém zákalu oblohy při svitu Měsíce (95%) mlhovinu M27 jak si s tím poradí SW eVscope. Myslím, že vzhledem k podmínkám to zvládnul celkem dobře, na obrázku lze nalézt hězdy do 18 magnitudy. Od postavení trojnožky na terasu (není vidět Polárka) zobrazil tento objekt za 3 minuty včetně veškeré procedury od zapnutí přes ustavení dalekohledu. Na okrajích jsou hvězdy do šeda, to je způsobeno maskování okrajů přes bílou masku v krajích se silnou vinětací. Samozřejmě se dá pořídit snímek bez této masky čistě obdélníkový s formátem PNG 8 bit v rozlišení 1280 × 960 pix. To se může hodit zejména u objektů, které by se do kulatého FOV nevešly nebo zcela natěsno jako např M65 a M66. Pokud není objekt v zorném poli tak jak potřebujeme, můžeme kompozici doladit ručně malým “Joystickem” na displeji tabletu ve dvou rychlostních krocích.

Co u dalekohledu chybí je možnost použití filtrů. Naštěstí výrobce vsadil kameru do tubusu o průměru 26 mm, tedy dá se s jednoduchým koncem tubusu z okuláru 1,25" nasadit přes tubus malý 1,25” filtr pro DSO apod. Po nasazení filtru ale nedojde k správnému vyvážení barev a u snímku se toto musí udělat ručně v počítači.Nejvhodnější se mi zdál Triband OSC od Altair Astro, který zahrnuje Hbeta, OIII a Halfa čáry. Samozřejmě dochází k posunu barev, nicméně není to tak viditelné jako u CLS. V obrázku je vidět mnohem méně hvězd a v mlhovině vystoupily slabší partie. Obrázky se samozřejmě dají ještě dodatečně upravit v počítači pro případnou prezentaci.

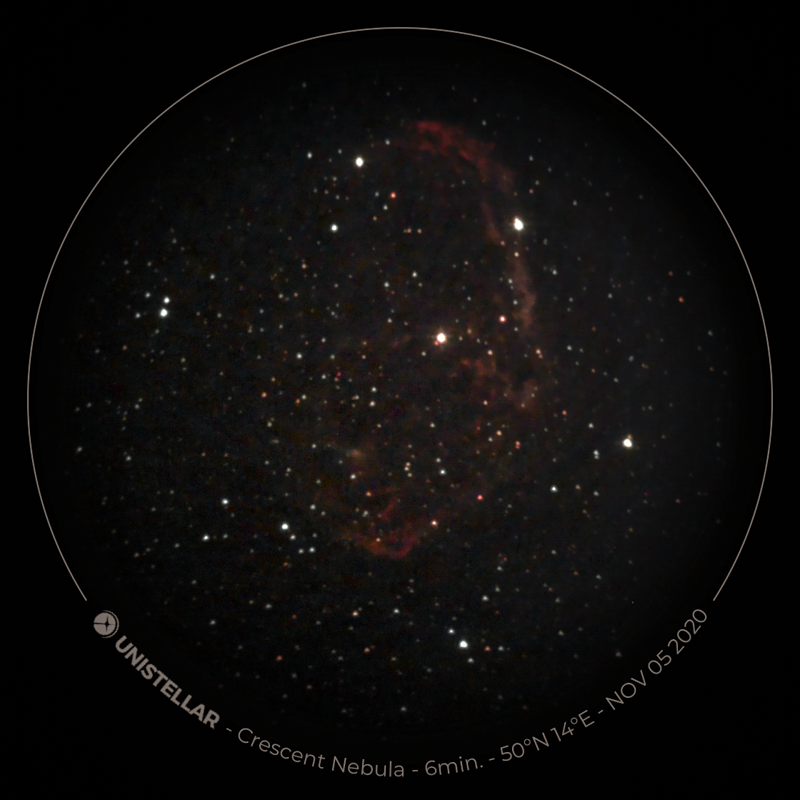
Dalekohled se hodí pro zobrazení jasnějších DSO tedy v zásadě Messier objektů a pak galaxií a malých jasnějších planetárních mlhovin. Nemůžeme počítat s tím, že vyfotíme slabé objekty typy Srpková mlhovina (NGC 6888). Po úpravách v počítači s filtrem lze vytáhnout asi to na obrázku níže. Bez filtru by byla vidět pouze nejjasnější partie mlhoviny v záplavě hvězd.
Na Cocoon mlhovinu (IC5146) s filtrem je to i po úpravách v počítači mizerné, v zásadě bez filtru není moc šance, pouze na velmi dobré obloze můžeme něco málo očekávat.

Co bude zajímavé, je pozorování zákrytů nebo slabší objekty do 14 mag, které lze sekvenčně natáčet. Bohužel jak jsem již psal, k sekvencím se lze dostat pouze hacknutím dalekohledu. Rovněž pro kulové hvězdokupy je dalekohled vhodný, zvláště když se snímek upraví v počítači kvůli dynamickému rozsahu. Tady mají ještě autoři rezervy ve zpracování obrazu. Pokud chce uživatel zachovat nepřepálenou jasnou oblast, musí nastavit jas a pozadí na minimum, v čemž ale zase zaniknou okrajové partie objektu.

Více fotografií naleznete v tomto photosteamu
Trochu vědy
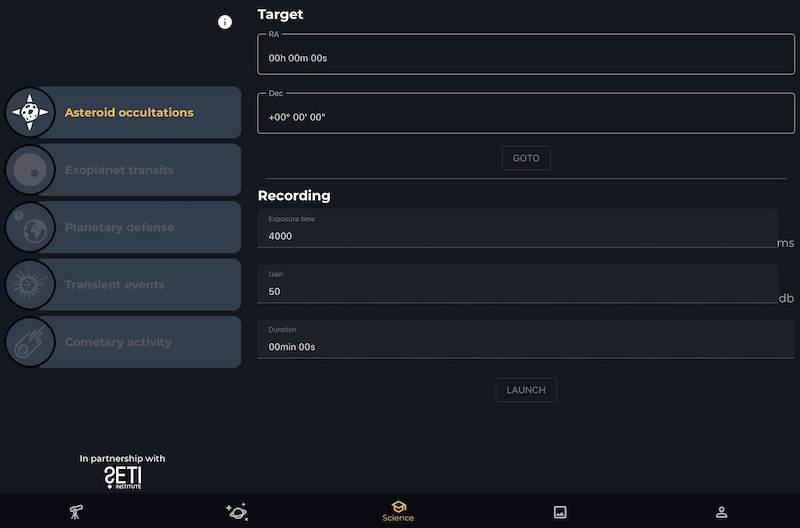
Unistellar připravuje několik zajímavých pozorování, které mají vědecký charakter a prvním je pozorování zákrytů hvězd planetkami, kde na jejich stránkách pravidelně zveřejňují zákryty včetně mapek a nastavení dalekohledu pro správné pořízení zákrytové sekvence. V přípravě jsou i další programy.
Zkoušel jsem s eVscope pozorovat i několik dní kometu 2/2020 M3 (Atlas) a po určení poloh z obrázků v 5-ti dnech jsem vypočítal parametry její dráhy, které se o moc neliší od skutečně uváděných.
Uváděná
e (eccentricity) : 0.9527070
q (perihelion distance) : 1.2682500
i (inclination) : 23.47350
Ω (Longitude of ascending node) : 71.25020
ω (Argument of perihelion) : 328.44640
Vypočítaná
e (eccentricity) : 0.8599804 +/-0.184
q (perihelion distance) : 1.30689 +/-0.0345
i (inclination) : 23.61476 +/-2.0
Ω (Longitude of ascending node) : 71.26390 +/- 0.4
ω (Argument of perihelion) : 333.88802 +/-2.9
Ten rozdíl v parametrech dráhy dělá v následujících 20 dnech rozdíl max 7 úhlových minut v deklinaci. Je jasné, že pokud by se počítala dráha z 20 pozorování, byl by rozdíl podstatně menší.

Závěr
eVscope je opravdu pěkně vymyšlený přístroj pro EAA astronomii, tedy nikoliv na kvalitní focení DSO, ale na opravdové online pozorování. Na planetární fotografii smysl nemá. Pro ty, co nesnášejí dlouhé přípravy před pozorováním a kabeláž, notebook, připevňování kamer apod., je to zajímavý a použitelný přístroj. Po registraci chodí upozornění Unistellar na nové události, případně výzvy k focení vybraného objektu. Výrobce se tak snaží lidi zapojit do nějakého pozorovacího programu a vytvořit určitou komunitu. Co chybí je jednoznačně diskuzní fórum na stránkách výrobce, kde by se začátečních dozvěděl více podrobností o dalekohledu a technikách focení. V současné době výrobce prodal asi 3000 kusů eVscope i když cena kolem 3000 EUR není vůbec malá a určitě neodpovídá ceně 114 Newton + AZ montáž + kamera ASI 224MC, ale na druhou stranu v takové sestavě nenaleznete elektronický okulár a vše propojené v kompaktní sestavě s plnou automatikou, kdy stačí stisknout tlačítko zapnutí a po 3 minutách se díváte na obrázky DSO.